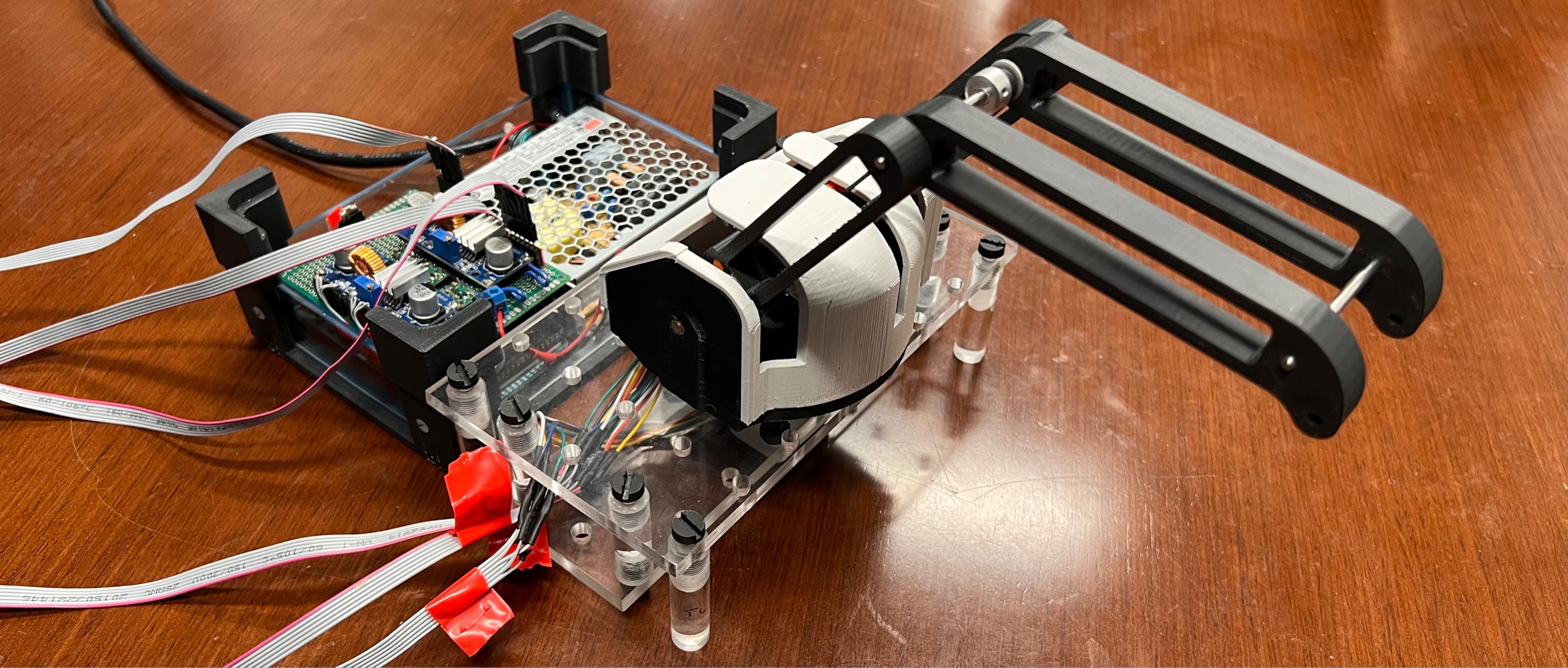
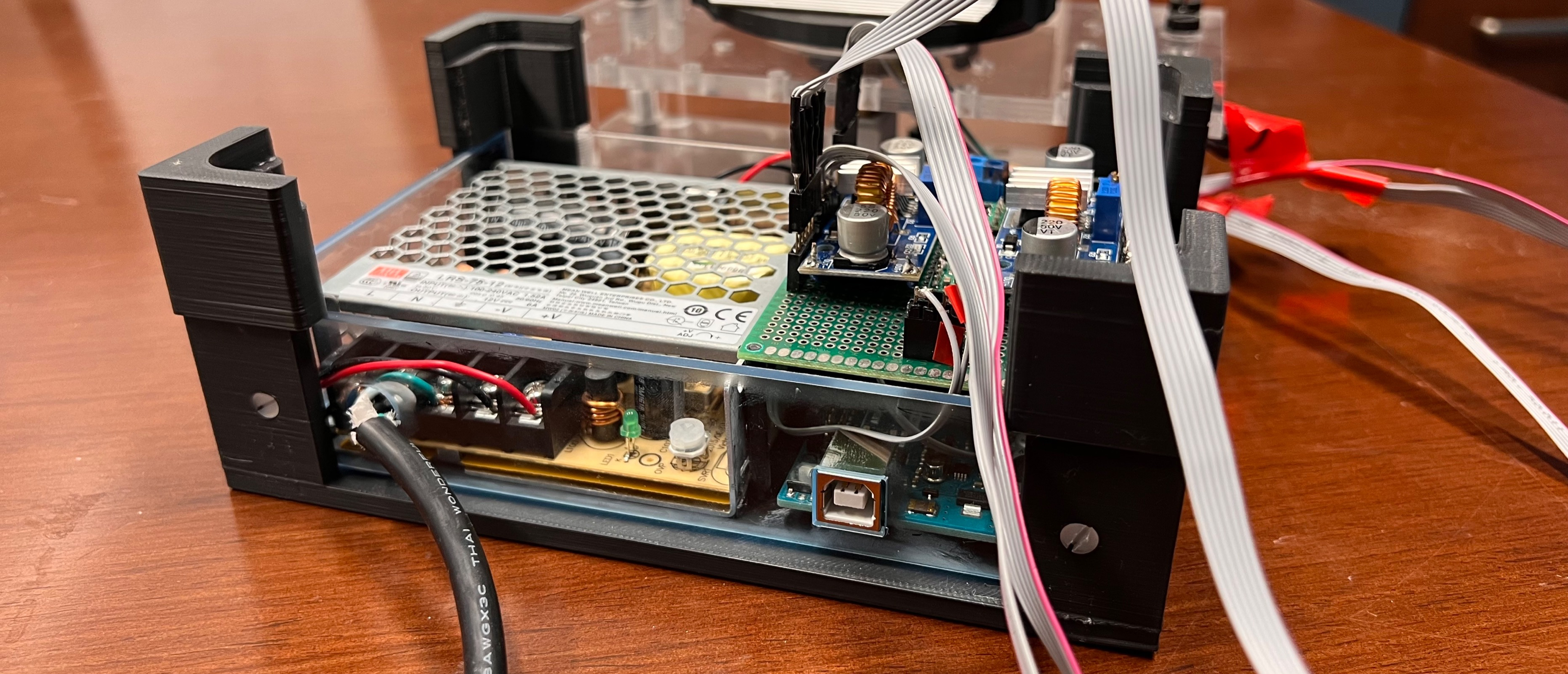
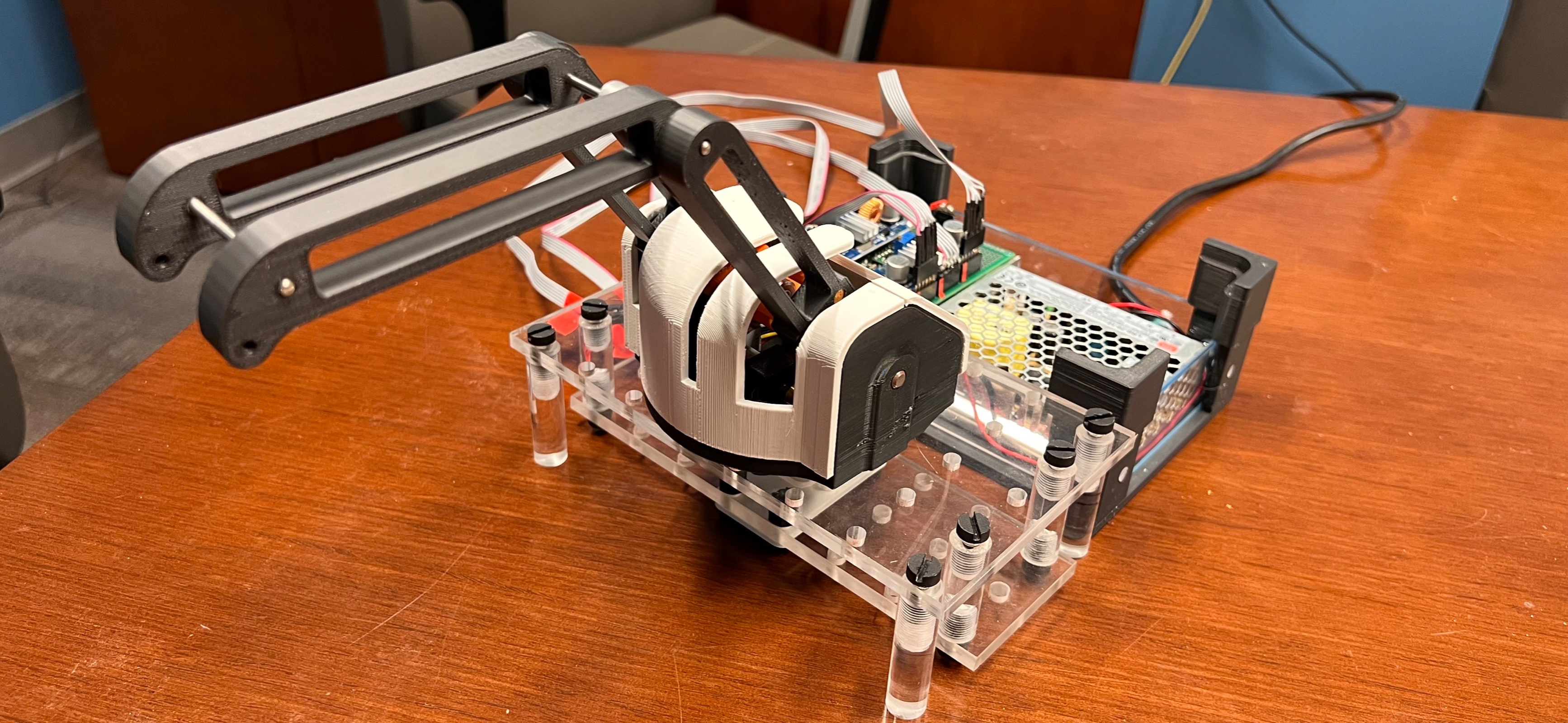
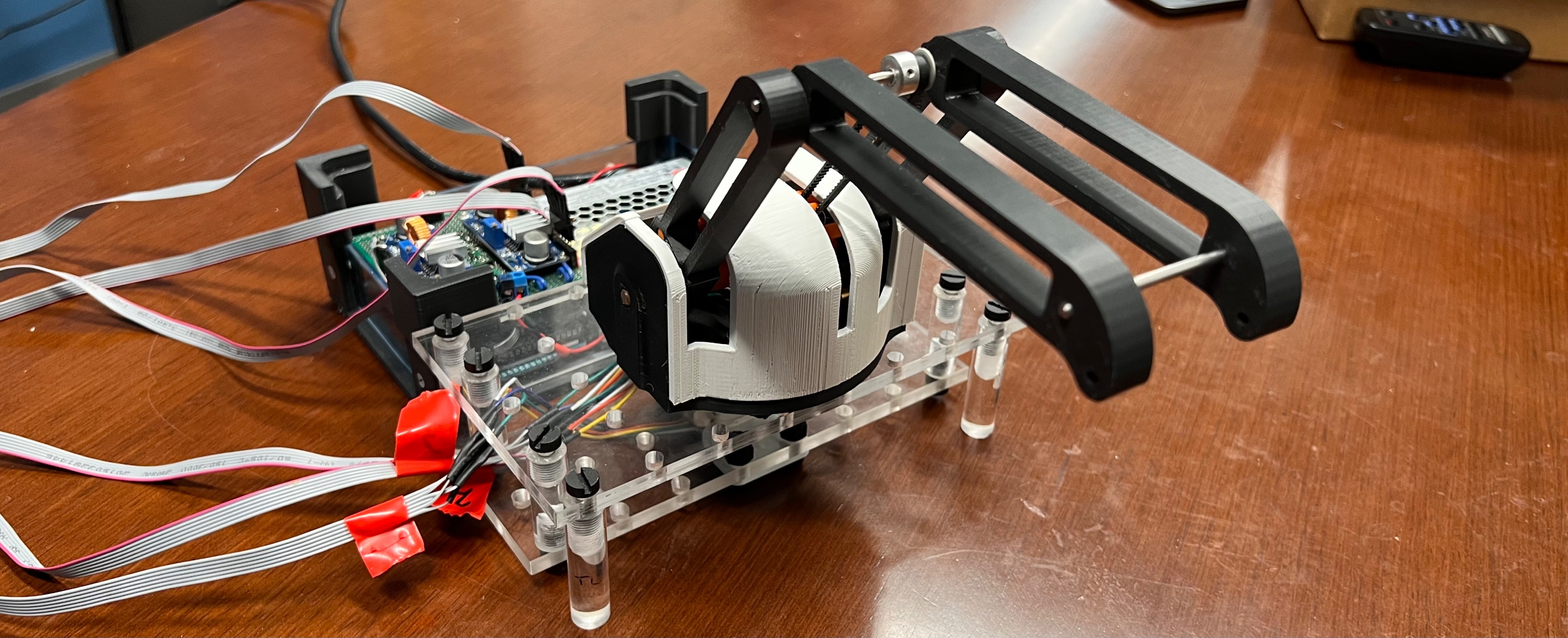
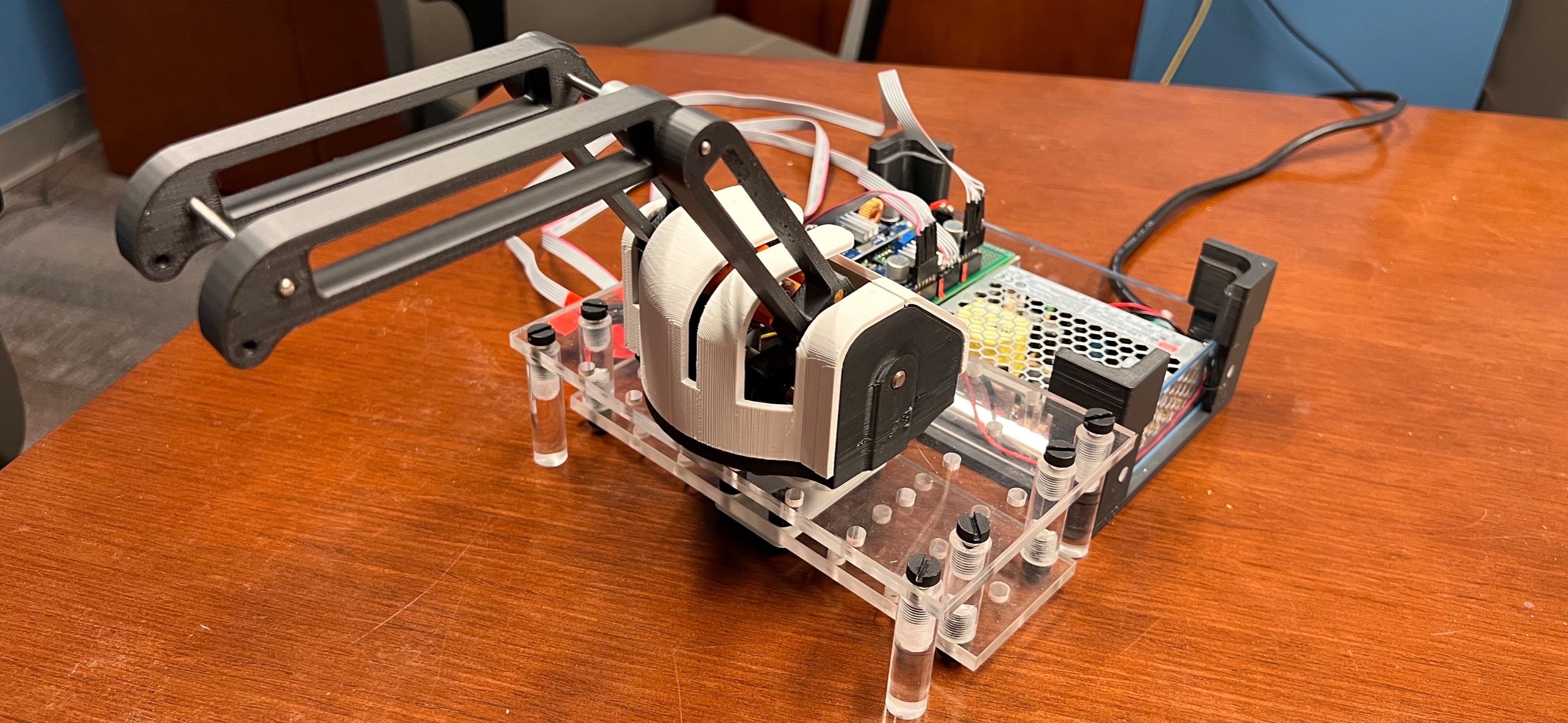
Robotic Manipulator
This was the first project I completed for
my medical robotics lab. This 3 degree of freedom robotic manipulator was the product of several months
of learning, designing, manufacturing, and programming. This project taught me valuable lessons about iterative
design, robotic systems, and manufacturing-oriented design. Most of the mechanical design was done on SolidWorks.
The electronics of this project forced me to familiarize myself with arduino programming, PID motor control, and
PCB design. Overall, this was an incredible learning experience.
1 / 6
2 / 6
3 / 6
4 / 6
5 / 6
6 / 6
❮
❯
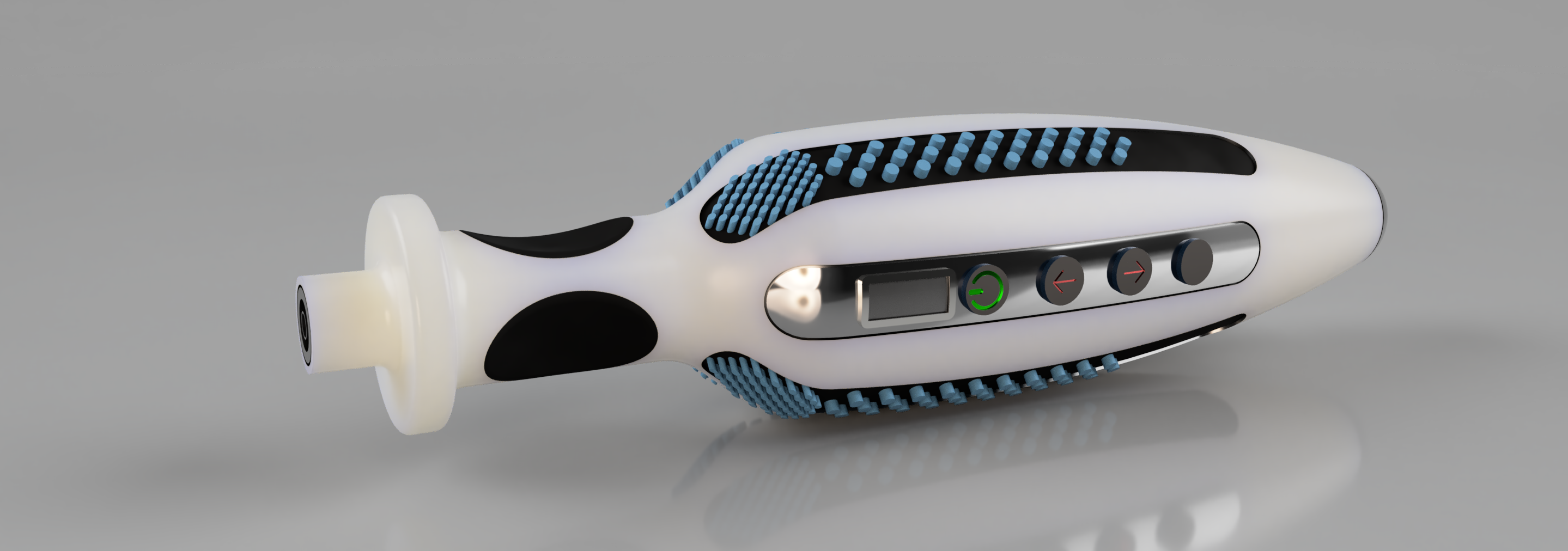
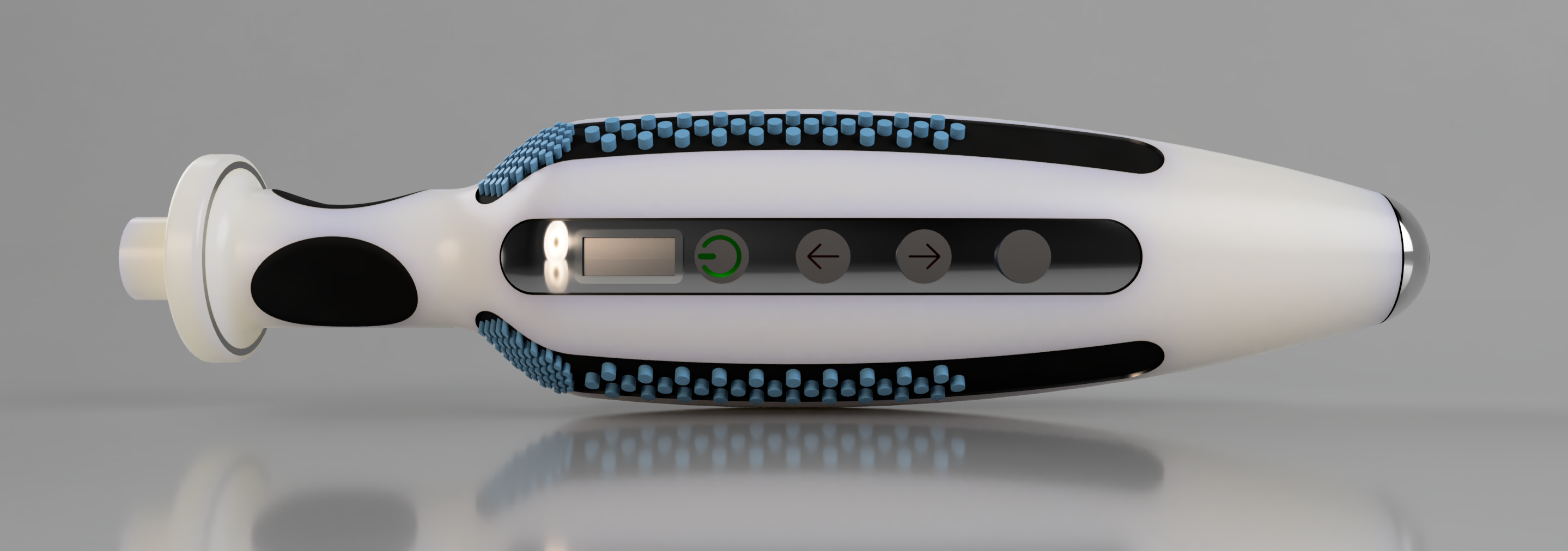
ETT Pressure Regulator
This project showcases a collaborative team effort. At the time of
this project, I was enrolled in a class titled "Introduction to Biomedical Engineering Design". I worked alongside 5
other students to identify a need for a cuff pressure regulatory device. Together, we created a device to regulate a
tailored air pressure in the ETT cuff for patients undergoing prolonged surgical procedures. I was responsible for the
majority of the visual and functional design. Seen below are some renderings of our final prototype.
1 / 6
2 / 6
3 / 6

4 / 6
5 / 6
6 / 6
❮
❯